



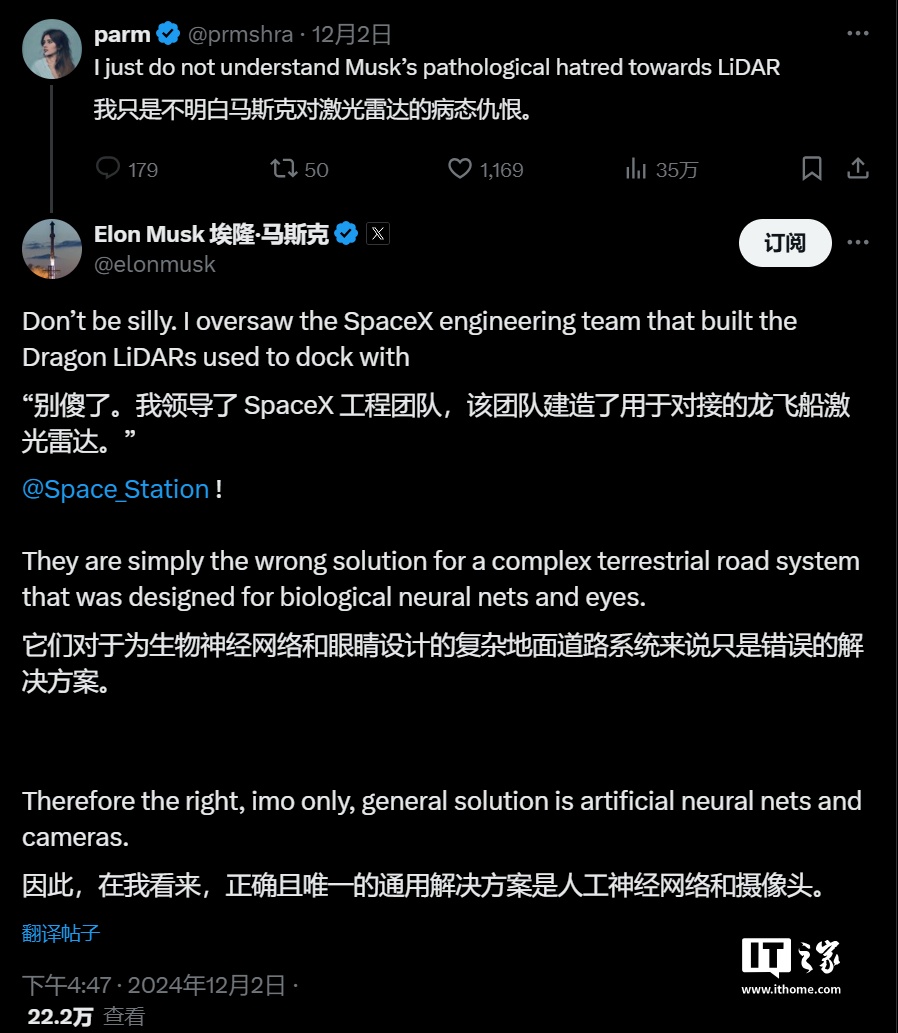
12 月 3 日消息,在自动驾驶领域,特斯拉坚持以纯视觉为核心的感知系统,甚至已在旗下所有车型中取消了毫米波雷达,选择完全依赖摄像头与人工神经网络来实现自动驾驶。特斯拉 CEO 埃隆・马斯克近期再次公开批评激光雷达,称其为“错误的解决方案”,并重申了其一贯的观点:在复杂的道路驾驶环境中,模拟生物神经网络和眼睛的视觉系统,才是最为有效的方式。

与特斯拉的“纯视觉”路线不同,国内多数汽车制造商和供应商采用的是融合感知方案。这种方案结合了激光雷达、摄像头、毫米波雷达等多种传感器,旨在增强系统的冗余性和感知能力。尽管如此,马斯克依然认为,激光雷达和雷达与视觉结合所带来的“感知不一致性”使得这些技术无法达到理想的效果。
注意到,在解释为何拒绝使用雷达时,马斯克曾多次强调,视觉系统尤其是基于显式光子计算的技术,在感知精度和可靠性上远超雷达和视觉的组合。他指出,当雷达与视觉感知数据发生冲突时,系统难以判断应该信任哪一方,这种不确定性是自动驾驶系统无法接受的隐患。特斯拉的自动驾驶系统正是模仿人类驾驶员的驾驶方式,通过摄像头实时采集路况信息,并借助视觉神经网络将图像转化为三维场景,再由自动驾驶计算机对场景进行分析和决策。
相比于人类驾驶员,特斯拉车辆的摄像头能够提供 360 度的视野,探测距离也远超人眼。而且,计算机在反应速度和处理能力上也具备显著优势,能够持续快速地做出决策,避免了人类驾驶员可能产生的疲劳和反应迟钝问题。
值得一提的是,目前国内一些厂家也开始逐渐弱化甚至舍弃激光雷达,转向纯视觉感知方案。例如,小鹏和极越等品牌已在其车型中减少对激光雷达的依赖。
本文链接:http://www.gihot.com/news-5-7402-0.html特斯拉 CEO 马斯克再谈激光雷达:纯视觉方案才是自动驾驶的未来
声明:本网页内容由互联网博主自发贡献,不代表本站观点,本站不承担任何法律责任。天上不会到馅饼,请大家谨防诈骗!若有侵权等问题请及时与本网联系,我们将在第一时间删除处理。








点击右上角 微信好友
微信好友
 朋友圈
朋友圈
点击浏览器下方“ ”分享微信好友Safari浏览器请点击“
”分享微信好友Safari浏览器请点击“ ”按钮
”按钮
![]()
点击右上角 QQ
QQ
点击浏览器下方“”分享QQ好友Safari浏览器请点击“”按钮
![]()
